<「はやぶさ2」から小惑星「リュウグウ」に2機の小型ロボットが投下された。小惑星へのローヴァーの着陸成功は世界初の快挙だ>
宇宙航空研究開発機構(JAXA)は2018年9月22日、小惑星「リュウグウ」を探査している探査機「はやぶさ2」から分離・投下した2機の小型の移動探査ロボット「ミネルヴァII1(MINERVA-II1)」を、リュウグウに着陸させることに成功したと発表した。
ミネルヴァII1はその後、写真や動画の撮影・送信にも成功。さらに写真などの解析から、リュウグウ表面を移動していることも確認できた。
小惑星へのローヴァーの着陸成功は世界初の快挙となった。そしてさらなる挑戦が待ち構えている。
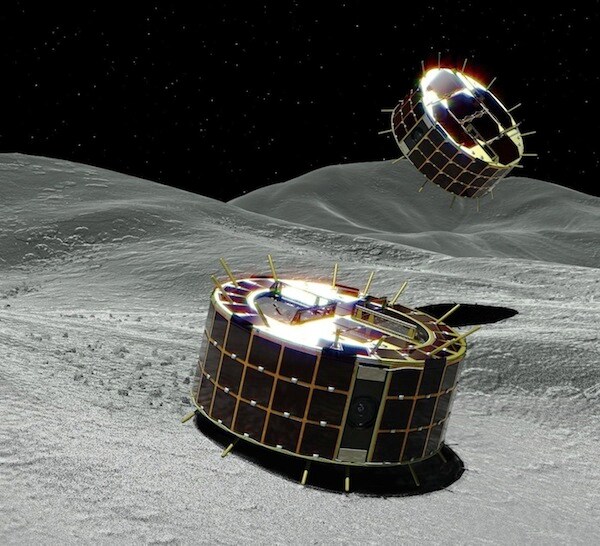
2機の小型の移動探査ロボット「ミネルヴァII1」
ミネルヴァII1(ツー・ワン)は、JAXAや日本の大学、メーカーなどが開発したローヴァー(移動探査ロボット)で、「はやぶさ2」に搭載されて打ち上げられ、小惑星リュウグウまでやってきた。
ミネルヴァII1は、2機のローヴァー「ローヴァー1A」と「ローヴァー1B」からなっており、それぞれが独立して動くようになっている。ローヴァー1A、1Bともに、直径18cm、高さ7cmの正十六角柱の形をしており、質量は約1.1kgと、手で持てるほどの小ささである。両機ともほとんど同型機だが、搭載しているカメラの台数などが異なる。
ローヴァーというと、NASAが火星で運用しているような、タイヤのついた"探査車"がおなじみである。しかし、リュウグウのような小惑星は重力が小さいため、タイヤで走行することができない。
そこでミネルヴァII1は、機体の内部にモーターを内蔵し、そのモーターを回転させた際の反動で機体が飛び跳ねる(ホップする)、「ホッピング機構」を使ってリュウグウ表面を移動するという仕組みを採用している。JAXAによると、1回のホップで、空中に飛び上がってから着地するまでに最大15分間ほど滞空し、水平方向に最大15mほど移動することができるという。これにより、複数の地点を探査することができる。
さらに、各ローヴァーには自律的に動けるような機構もあり、自分自身で状況を判断しながら探査を行うこともできる。